
Advancing CubeSat Digital Twin Simulation: Industrial Liaison Forum 2025
Published:
The project “Designing a Generic Digital Twin for a CubeSat” focuses on developing a MATLAB-based simulation to model CubeSat dynamics. The simulation incorporates quaternion-based state propagation, disturbance torques, and initial control logic. This post outlines the current status, simulation results, and next steps in refining the CubeSat’s digital twin.
Current Simulation Features
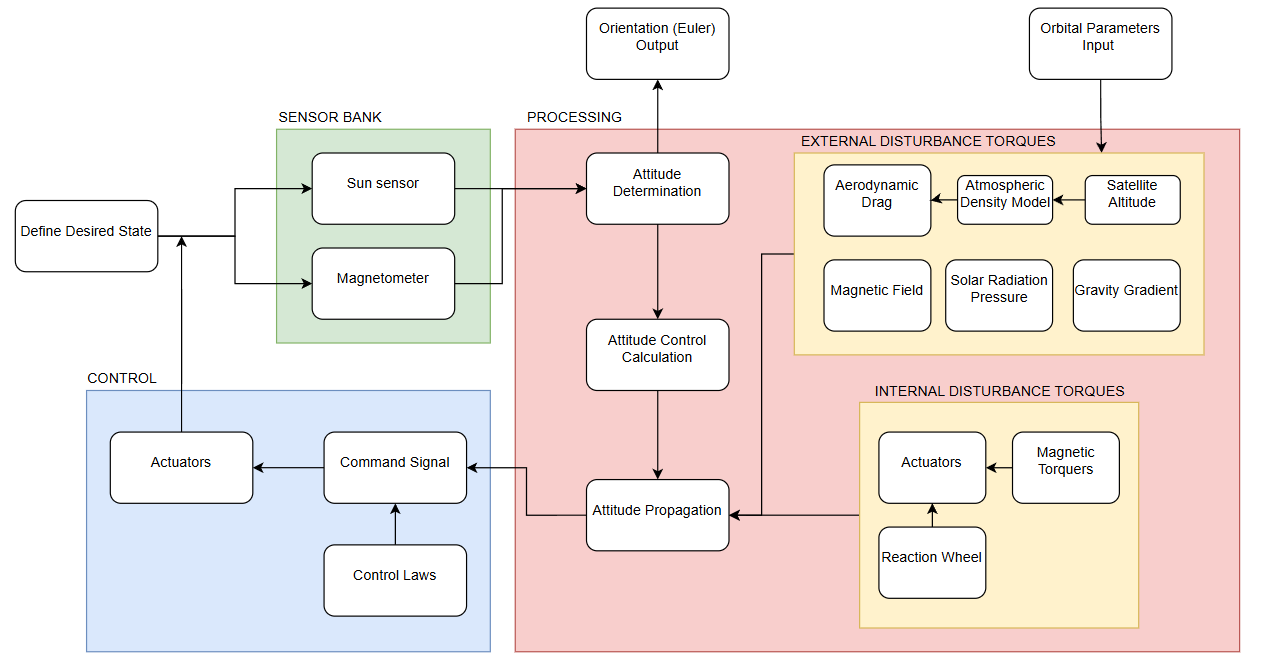
The MATLAB simulation provides a structured approach to modeling CubeSat motion. It currently implements:
- Quaternion-Based Attitude Representation: Ensuring numerically stable orientation tracking.
- 3D Visualization: Real-time rendering of CubeSat orientation over time.
- Disturbance Modeling: External torques from gravity gradient, aerodynamic drag, and residual magnetism.
- Detumbling Control: Basic quaternion feedback controller for stabilization.
This setup establishes a foundation for integrating more advanced control and sensing capabilities.
System Diagram
Simulation Results
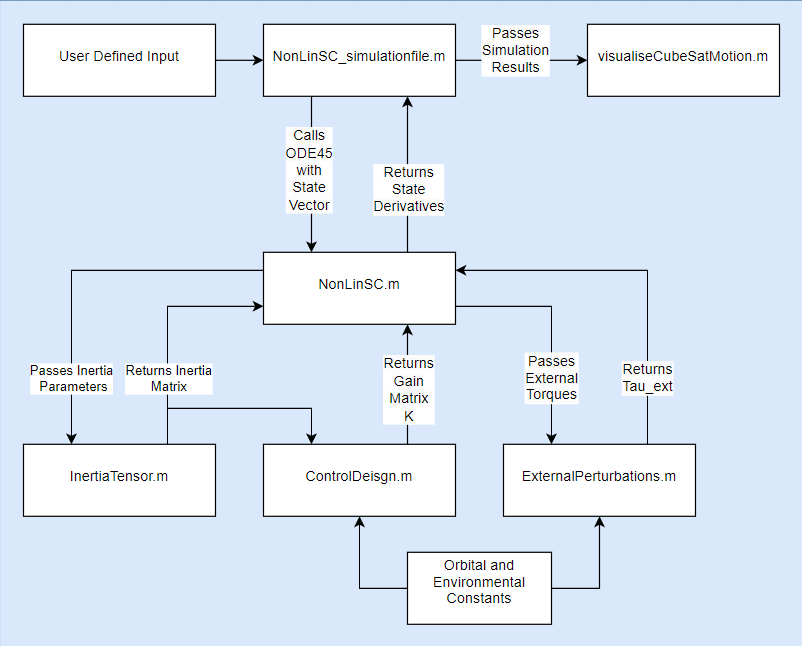
Simulation Diagram
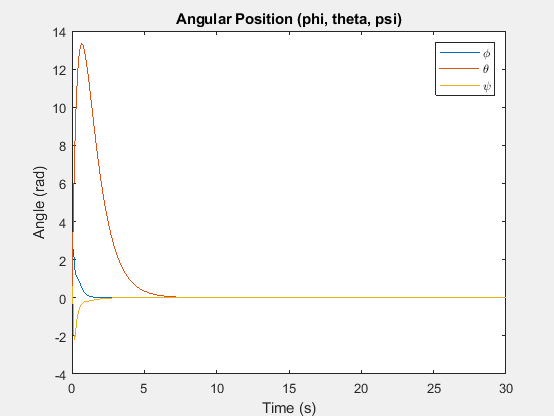
The CubeSat’s behavior under quaternion feedback control has been analyzed, with key outputs including:
Orientation Evolution (Roll, Pitch, Yaw)
The simulation plots the CubeSat’s angular motion over time.Angular Velocity Decay
The detumbling algorithm effectively reduces angular rates.External Disturbance Effects
Gravity gradient and drag torques influence motion over time.
Output Plots
Video Demonstration
Below is a video showcasing the CubeSat’s simulated detumbling motion:
Next Steps
The upcoming development phases focus on enhancing the CubeSat model with:
- Actuator Integration: Implementing reaction wheels and magnetorquers for active control.
- Sensor Simulation: Modeling gyroscopes, sun sensors, and magnetometers for attitude determination.
- Refined Environmental Modeling: Enhancing disturbance torques with high-fidelity space environment effects.
- Advanced Control Laws: Testing and optimizing ADCS control strategies.
Conclusion
This milestone brings the CubeSat digital twin closer to real-world applicability. The integration of actuators, sensors, and refined environmental models will significantly enhance simulation accuracy.
For further discussions or collaborations, contact j.hubbard@se21.qmul.ac.uk. Stay tuned for more updates! 🚀